«El commodore 64. El cacharro que me disparó en este mundo».
Todo empezó en diciembre de 1983 cuando mi padre me compró el primer Commodore 64. Aquel aparato lo fuimos a comprar a una tienda de aparatos electrónicos llamada SONYTEL de Huelva, ubicado en la Plaza de la Merced.

Fue el regalo de reyes pero lo compramos a principios de las navidades para que lo pudiera disfrutar todas las navidades. ¡Y qué navidades! Todas las mañanas de esas vacaciones con el cacharro enchufado a la tele de mi salita, con el manual en la mano y probando mis primeras líneas de código de mi vida.
Nunca olvidaré aquel POKE 53281,15 que me cambió el color de la pantalla de ordenador. Y a la vista de esto, mi primer programa en Basic del Commodore:
10 FOR I = 1 TO 10
20 POKE 53281,I
30 NEXT I
Magia, aquello me maravilló.
Recuerdo perfectamente que estudiaba 1º de BUP y me llevé todas las navidades leyéndome el manual del Commodore (que aun conservo en mi despacho) y el último día de reyes concluí mi primer programa completo: «Resolver la ecuación de segundo grado».
Ahí empezó todo!!!!….
Después acabé BUP y COU, empecé la licenciatura en informática en al Facultad de Informática y Estadística de la Universidad de Sevilla (promoción 88-93) y cuando acabé la carrera me metí en un grupo de investigación de Robótica y Procesamiento Paralelo y simultáneamente, desarrollé mi proyecto de fin de carrera en el 93-94:
«Adaptación del kernel de linux para sistemas en tiempo real y control de robots».
Con el proyecto que me llevé más de un año, es donde inicié mi pasión tanto por Linux como por la robótica.
Empezando por linux, fueron años dorados con el verdadero inicio de internet, donde por primera vez en el año 1984, en aquel zulo de la factultad (el laboratorio del departamento de Arquitectura y Tecnología de Computadores) empezamos a descubrir el acceso a servidores de universidades americanas, primero con el FTP, posteriormente el acceso a documentación de dichas universidades con hipertexto en consolas de terminal (con GOPHER y WHAIS) y ¡magia! el acceso con un software llamado «Mosaic» de la NSA, a información multimedia e hipertexto. Fue mi primer contacto con un navegador de internet.
Ahora visto a toro pasado, puedo decir, que viví en directo el nacimiento del internet que conocemos ahora.
De la misma forma también descubríamos el mundo linux con las primeras distribuciones en diskettes, SLS de Softlanding, Slackware y Debian, sí Debian, la Debian que conocemos hoy , ya existía en el año 1994. Todavía recuerdo instalar una SLS en tres diskettes en un ordenador 486sx. También era magia!!!1 Acostumbrados a usar sistemas operativos UNIX (AIX y SunOS) de grandes computadores de la facultad, resultaba sorprendente disponer de UNIX en un PC. Al poco tiempo llegó también el entorno X-windows y parecía maravilloso tener un gestor de ventanas sobre el sistema operativo, cuando recientemente había aparecido las primeras versiones de Windows 3.1.
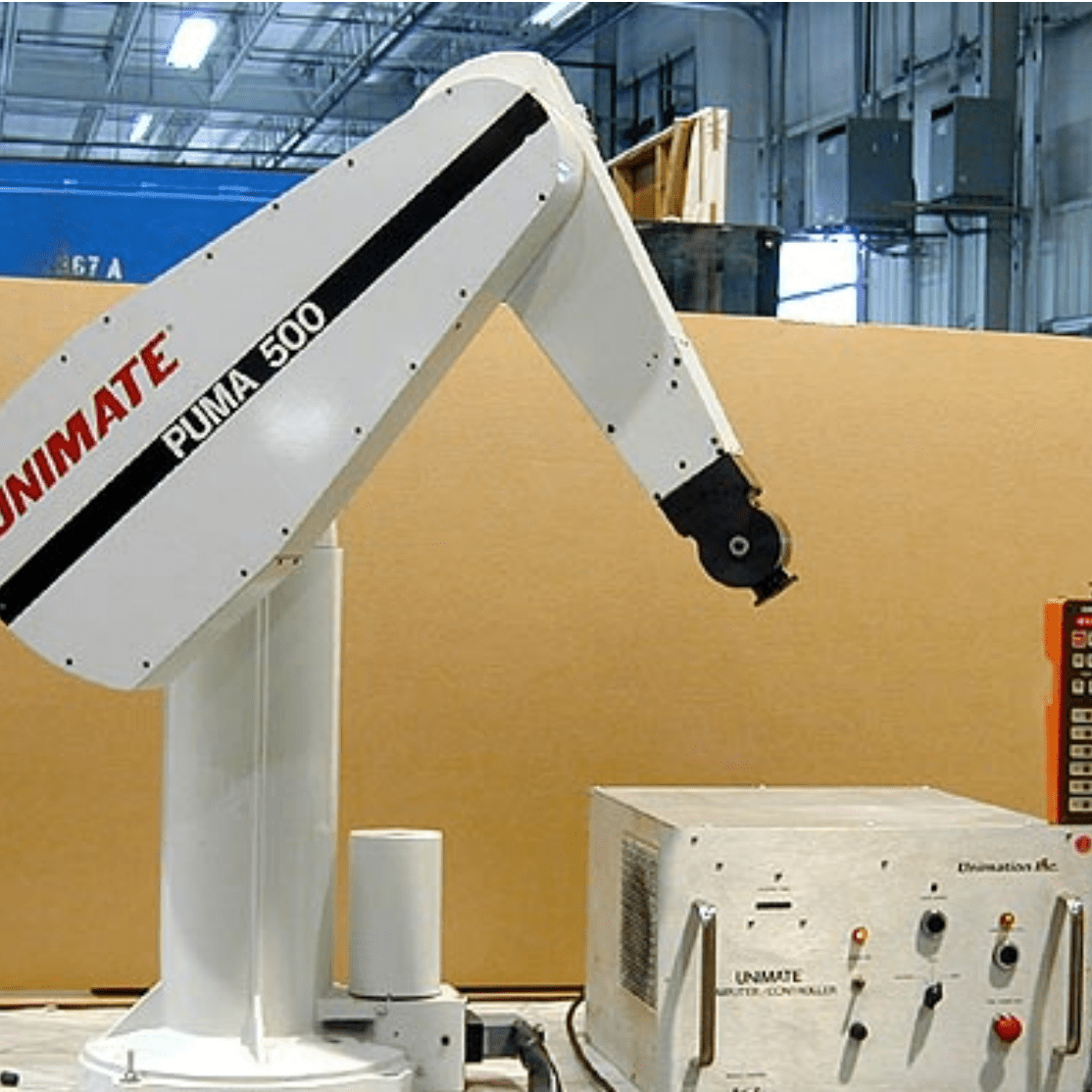
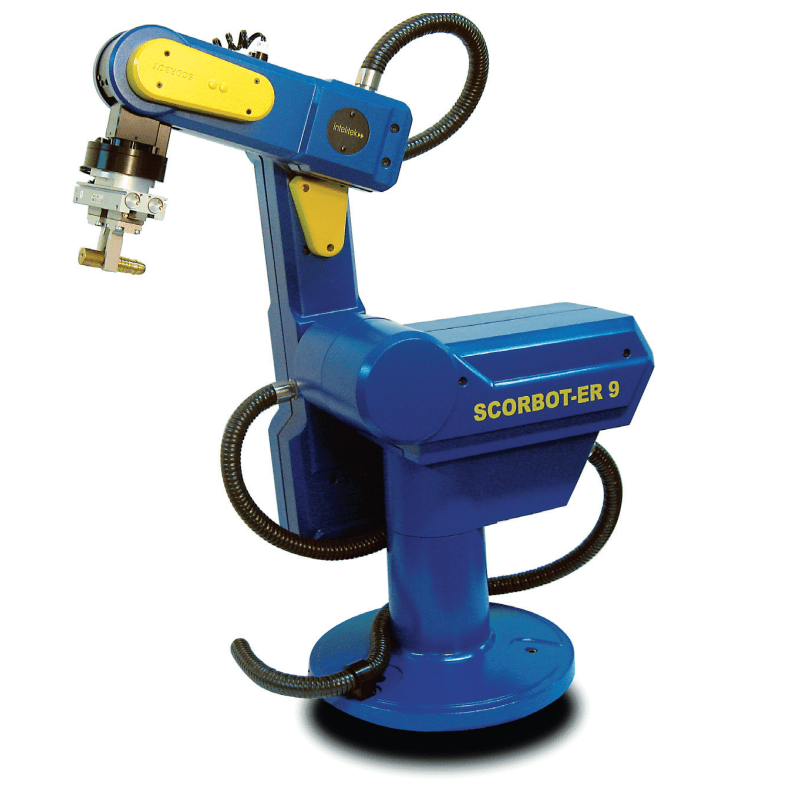
En cuanto a la robótica, dado que estaba desarrollando el Proyecto Fin de Carrera centrado en este tema, en el departamento de ATC tenía varios profesores mentores (Gabriel Jimenez y José Luis Sevillano) que me hicieron aprender muchísimo sobre todo lo que envuelve a los brazos de robots de la época. PUMA 500 y SCARA y SCORBOT y la necesidad de sistemas operativos en tiempo real para gobernarlos. También fue mi gran descubrimiento de los lenguajes C y C++.

Cuando terminé el proyecto fin de carrera, ya empecé a trabajar en empresas del sector del desarrollo (CORITEL, CIBERNOS,….) y después me hice funcionario del cuerpo superior facultativo de informática de la Junta de Andalucía, pero ya esto es otra historia.